Design & Robotics 6°Ed
Design & Robotics 6°Ed – Emotional Robotics
INTRODUCTION
Design & Robotics is a course proposed by Prof. Andrea Bonarini and Prof. Maximiliano Romero in 2011 at Politecnico di Milano. Since the first edition, this course has been improved as result of the experience and the students suggestions.
You can see also the institutional web page of the course HERE
Presentation of the course
MOTIVATION
Robots have been mentioned as the next techological devices we will have in our homes, after PCs and cell phones.
The robotics industry faces many of the same challenges that the personal computer business faced 30 years ago. This is the vision of the future offered by Bill Gates [1] who argues that the robotics industry is on the cusp of a big expansion. “The level of excitement and expectation reminds me so much of that time when Paul Allen and I looked at the convergence of new technologies and dreamed of the day when a computer would be on every desk and in every home… I can envision a future in which robotic devices will become a nearly ubiquitous part of our day-to-day lives.” A robot in every home!
Now, a challenge is enabling robots to quickly sense and react to their environments. Recent decreases in the cost of processing power and sensors are allowing researchers to tackle these problems. Another challenge is to become more and more friendly and useful to the humans. This could be the main opportunity for a new skilled robot-designers. The design of such devices plays a key role in their diffusion, and requires a strong interaction among people working on technical aspects (sensors, actuators, programming) and people developing to aspects more related to the design tradition, such as: shape, usability, interaction.
AIMS OF THE COURSE
This course aims to provide an overview and insight into the many categories of robot technology, as well as closely related fields, such as physical computing and human-computer interaction. Through the collaboration between teachers and students coming from Information Engineering School and Design School, this course is aimed at developing interdisciplinary competences to design of mobile devices such as robots.
LEARNING OBJECTIVES
Knowledge
By the end of the course, students will have learned to:
- understand how robots could be designed.
- combine electronics, mechanics and design in order to create expressive robots.
- critically investigate the choice of design to arrive at the best solution considering content and context.
- use electronic sensors, actuators and related software.
- be fluent in the current issues concerning the design of robots.
Creative & Critical Thinking
By the end of the course, students will have learned to:
- respond to a design brief by resolving programmatic, formal and functional demands
- reinforce critical design explorations with ideas/precedents and foundations that build up complexity
- acquire a firm understanding of the problems and needs of robots design challenges and the manners in which they may be addressed.
Communication
By the end of the course, students will have learned to:
- work in multidisciplinary teams
- convincingly communicate design concepts
- engage design-specific knowledge and vocabulary
- speak to personal design ideas with confidence and present ideas in a structured and convincing way
CONTENT
The purpose of this year is to develop a robot capable of winning an expressive performance contest, where expressivity is as important as technology.
The rules and limitations will be presented at the beginning of the course.
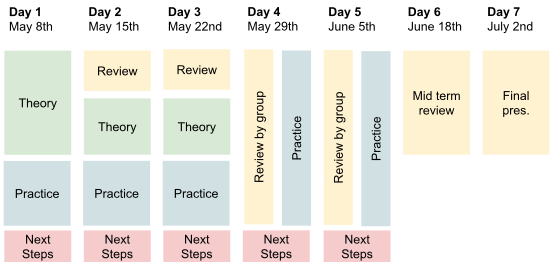
ORGANIZATION
The course includes few periods of common work in the Laboratories of the Design Department and Department of Electronics, Information, and Bioengineering:
- 5 full days: Each Tuesday from May 5th to June 8th. In these full days (8 hours) theory and practice about theoretical bases of Robotics, human-robot interaction, robot making (including mechanics, sensors, Arduino) will be exploited. Each aspect will be presented and then tested on real robots that will be built in interdisciplinary groups. At this moment, groups will have acquired basics needed to design and start to implement prototypes.
- Also in the following weeks, groups will be free to work in the AIRLab where teachers and other people are available to support groups in the development of their first full, working prototype, which will be evaluated by mid June.
- 1 half day in June: First design of the robots will be presented by each group, together with the results of the first experimentations, and discussed with the tutors.
- 1 half day at end of June: Robots are presented, delivered, and left to the evaluators for the final evaluation with end users.
Each student/group will work autonomously in the periods between first lesson and final presentation.
ASSESSMENT
The final evaluation of the course will consider both the functional, aesthetic, and technological results, as well as the behavior of the robot in the final test.
There will be a public presentation of the final products, and the evaluation will take in to account the audience opinion.
The assessment will be based on this criteria:
- The creativity with which the assignment was met
- The mastery of the technical challenges of the project
- The coherence of the design concept and realization
- The degree to which a variety of design concepts were explored to arrive at the result
- The expressiveness of the final project
- The professionalism of the presentation of the project
- The idea – and the degree to which it engages its audience
Each team will be also self-evaluated in relation to the organization and collaboration.
BACKGROUND
No specific competence is needed, except the ones expected for students starting a Design or Information Engineering (Computer Engineering, Automation, Electronics, Telecommunication) master track.
ENROLLMENT
All students must include the course in their study plan and fill ALSO the form available HERE
GROUP WORK
Collaborative work is essential in the field of design; and group work will take place during course project. The number of components will be defined by the staff as result of the class composition.
ATTENDANCE AND PARTICIPATION
Attendance and participation is an important aspect of the learning process, and you are expected to attend ALL the days.
EXPECTED WORKLOAD
You should expect to spend approhimately 150 hours on this course, corersponding to 5 CFU, including both scheduled class time and independent activity.
MATERIALS AND EQUIPMENT REQUIRED
Students will need to provide all materials and equipment as necessary for the completion of required work. Required: Arduino microcontroller and electronic components. (or specific robot platform to be defined) The expected contribution from each student may reach about €50.
You can find some suggestions in the AIRWIKI web site of the AIRLab.
SUBMISSION OF WORK
Student are responsible for ensuring their work is uploaded to the course web site on time and in the required format.
For further information students may contact the teachers, or:
PhyCo Lab: phycolab@gmail.com
AIRLab: airlab@elet.polimi.it
REFERENCES
A very depressed robot
Interactive displays
Happy and playful robot
Kismet
Leonardo
An unexpressive director
A slightly more expressive one
The original Luxo movie

https://youtu.be/6G3O60o5U7w
Real robots implementation of Luxo movie
Pixar movie
https://www.youtube.com/watch?v=6G3O60o5U7w&t=50s
Robotic Luxo
Wall-e
BB8
Robots with soul
Animation basics
Time and timing in animation
R2D2 in love